DIRECT CURRENT MOTOR
The electric motor operated by dc is called dc motor. This is a device that converts DC electrical energy into a mechanical energy.
CONSTRUCTION
Main Parts of the DC Motor
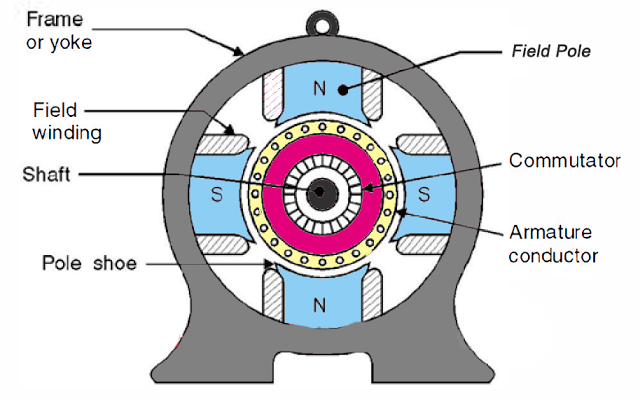
1.Yoke
Another name of a yoke is the frame. The main function of the yoke is to offer mechanical support for poles and protects the entire machine from the moisture, dust, etc.
2.Pole and Pole Core
The pole of the DC machine is an electromagnet and the field winding is winding among pole. Whenever field winding is energized then the pole gives magnetic flux.
3.Pole Shoe
Pole shoe in DC machine is an extensive part as well as enlarge the region of the pole. Because of this region, flux can be spread out within the air-gap as well as extra flux can be passed through the air space toward armature.
4.Armature Winding
The armature winding can be formed by interconnecting the armature conductor. Whenever an armature winding is turned with the help of prime mover then the voltage, as well as magnetic flux, gets induced within it. This winding is allied to an exterior circuit.
5.Commutator
The main function of the commutator is to collect the current from the armature conductor as well as supplies the current to the load using brushes. And also provides uni-directional torque for DC-motor. The Segments in the commutator are protected from thin mica layer.
6.Brushes
Brushes gather the current from commutator and supplies it to exterior load. Brushes wear with time to inspect frequently.
PRINCIPLE
When a current carrying conductor is placed in a magnetic field, it experiences a torque (mechanical force) and has a tendency to move. The DC motor or direct current motor works on this principal. This is known as motoring action.

The direction of rotation of a this motor is given by Fleming’s left hand rule and its magnitude is given by,
F=B*I*L
Where,
B = Magnetic flux density
I = Current and
L = Length of the conductor within the magnetic field.
B = Magnetic flux density
WORKING

The circle in the center represents the direct current motor. On the circle, we draw the brushes. On the brushes, we connect the external terminals, through which we give the supply voltage. On the mechanical terminal, we have a shaft coming out from the center of the armature, and the shaft couples to the mechanical load. On the supply terminals, we represent the armature resistance Ra in series.
When the input voltage E, is applied across the brushes. Electric current which flows through the rotor armature via brushes produces a torque Tg.
Due to this torque Tg the dc motor armature rotates. As the armature conductors are carrying currents and the armature rotates inside the stator magnetic field, it also produces an emf Eb .
The generated Emf Eb is directed opposite to the supplied voltage and is known as the Back Emf.
The back emf is represented by,

Where, P = no of poles
φ = flux per pole
Z = No. of conductors
A = No. of parallel paths
N = speed of the DC Motor
When the application of load reduces the speed of the motor, Eb decreases. Thus the voltage difference between supply voltage and back emf increases that means E − Eb increases.
Due to this increased voltage difference, the armature current will increase and therefore torque and hence speed increases. Thus a DC Motor is capable of maintaining the same speed under variable load.
Now, armature current Ia is represented by

Now at starting, speed ω = 0 so at starting Eb = 0.

Now since the armature winding electrical resistance Ra is small, this motor has a very high starting current in the absence of back Emf. As a result we need to use a starter for starting a DC Motor.
Now as the motor continues to rotate, the back emf starts being generated and gradually the current decreases as the motor picks up speed.

Now at starting, speed ω = 0 so at starting Eb = 0.

Now since the armature winding electrical resistance Ra is small, this motor has a very high starting current in the absence of back Emf. As a result we need to use a starter for starting a DC Motor.
Now as the motor continues to rotate, the back emf starts being generated and gradually the current decreases as the motor picks up speed.



No comments:
Post a Comment