DC MOTOR TYPES
It is important to know the various types of DC Motors that is use in industries for lot of purposes. Let us discuss in detail.

1.Separately Excited DC Motor

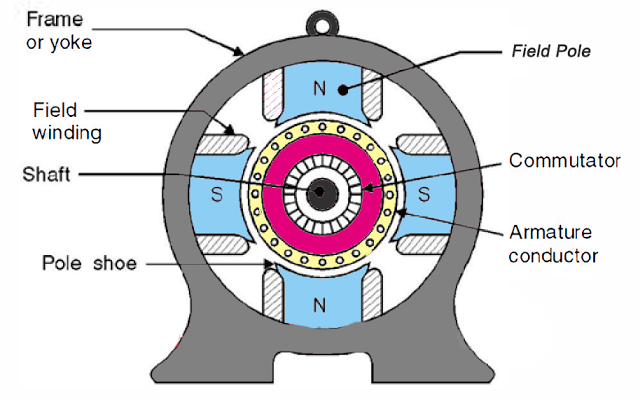
In case of a separately excited DC motor the supply is given separately to the field and armature windings. In this dc motor, the armature current does not flow through the field windings, as the field winding is energized from a separate external source of DC current as shown in the figure.
From the torque equation of DC motor,
Tg = Ka φ Ia
So the torque in this case can be varied by varying field flux φ, independent of the armature current Ia.
2.Permanent Magnet DC Motor

The permanent magnet DC motor consists of an armature winding but does not necessarily contain the field windings.
The rotor has a conventional DC armature with commutator segments and brushes. The diagrammatic representation of a permanent magnet DC motor is given below.
The torque equation of DC motor suggests

Here φ is always constant for PMDC motor.
Therefore, for a Permanent Magnet DC motor

Where, Ka1 = Ka.φ which is another constant. In this case.
3. Self Excited DC Motor
In case of self excited
- Shunt wound DC motor
- Series wound DC motor
- Compound wound DC motor
Let’s now go into the details of these types of self excited DC motor.
3.1. Shunt Wound DC Motor
In case of a shunt wound DC motor the field windings are exposed to the entire terminal voltage as they are connected in parallel to the armature winding as shown in the figure below.

Voltage Equation
E = Eb + IaRa
3.2. Series Wound DC Motor
In case of a series wound self excited DC motor , the entire armature current flows through the field winding as its connected in series to the armature winding. The series wound self excited DC motor is diagrammatically represented below.

Voltage Equation
E = Eb +
Ia (Ra+Rs)
Torque Speed Characteristics
In a series wound DC motor, the speed varies with load. And operation wise this is its main difference from a shunt wound DC motor.
3.3 Compound Wound DC Motor
The compound excitation characteristic in a DC motor can be obtained by combining the operational characteristic of both the shunt and series excited DC motor. The compound wound self excited DC motor contains the field winding connected both in series and in parallel to the armature winding as shown in the figure below:

The excitation of compound wound DC motor can be of two types depending on the nature of compounding.
3.3.1 Cumulative Compound DC Motor
When the shunt field flux assists the main field flux, produced by the main field connected in series to the armature winding then its called cumulative compound DC motor.
ФTotal =
ФSeries+ ФShunt
3.3.2 Differential Compound DC Motor
In case of a differentially compounded self excited DC motor, the arrangement of shunt and series winding is such that the field flux produced by the shunt field winding diminishes the effect of flux by the main series field winding.
ФTotal =
ФSeries- ФShunt
The net flux produced in this case is lesser than the original flux and hence does not find much of a practical application.
Torque Speed Characteristics
Both the cumulative compound and differential compound DC motor can either be of short shunt or long shunt type depending on the nature of arrangement .
Short Shunt DC Motor
Circuit Diagram

Long Shunt DC Motor
Circuit Diagram